Adesso passiamo al montaggio di tre fotoresistenze.
Le fotoresistenze sono un componente che ci permette di misurare la luce a cui vengono esposte.

Il modo in cui funzionano è molto semplice:
La fotoresistenza non è altro che una resitenza che varia al variare della luce, quindi, se collegata ad una porta analogica e poi all'alimentazione (5 Volt), possiamo misurare la sua variazione.
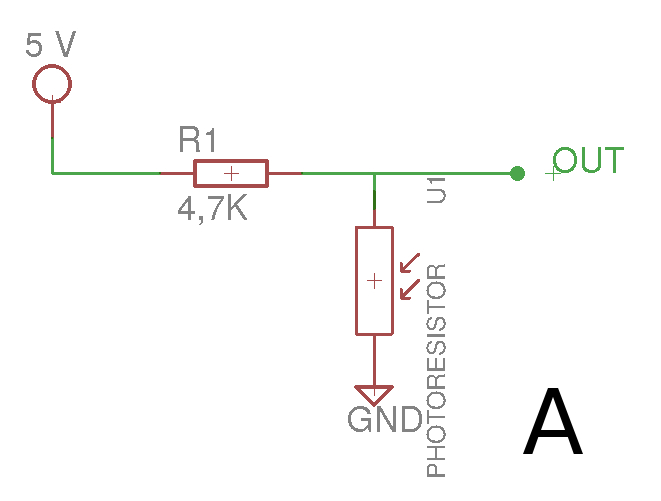
Collegando la resistenza come nello schema A, avremo la massima tensione al buoi e la minima alla luce piena.
Massima luce= 0 Volt
Minima luce = 5 Volt
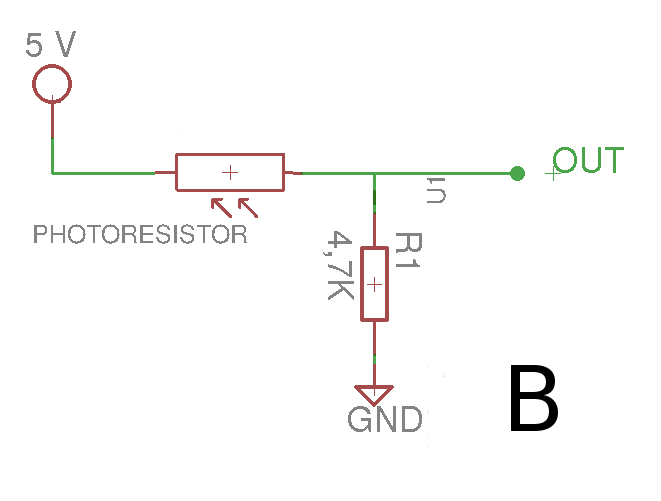
Collegando la resistenza come nello schema B, avremo la minima tensione al buoi e la massima alla luce piena.
Massima luce= 5 Volt
Minima luce = 0 Volt
Con tre resistenze collegante nel modo sopra descritto, possiamo sapere se il robot si trova sotto la luce diretta o in penombra e decidere cosa fare.
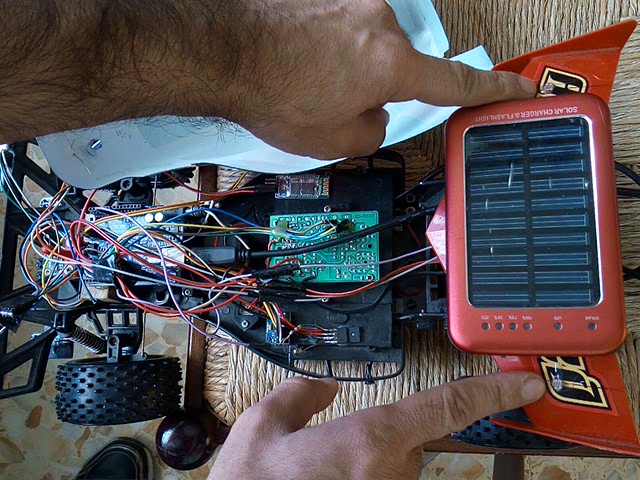
Io ho scelto di dotare il robot di un pannello solare, in questo modo, quando il robot si trova sotto il sole si può ricaricare in modo autonomo.
Eventualmente il robot rilevi lo spostamento del sole, oppure la diminuzione di luce, potrebbe effettuare una manovra per cambiare posizione e tornare sotto il sole diretto.
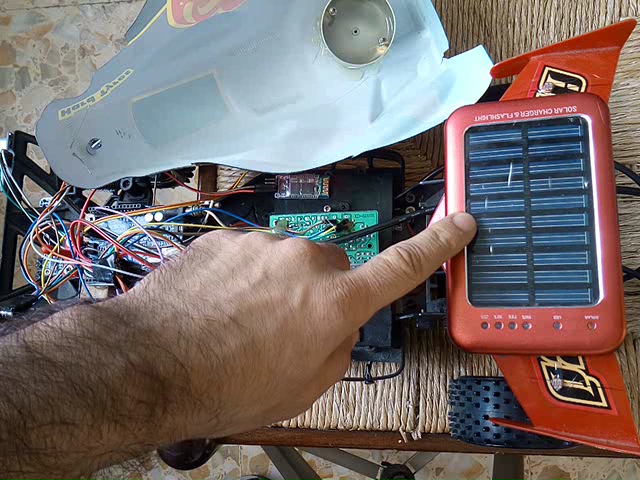
Le resistenze sono state montate: due ai lati del pannello solare ed una nel muso della macchina.
Le porte utilizzate sono:
A1 = Fotoresistenza sinistra
A2 = Fotoresistenza centro (muso)
A3 = fotoresistenza destra
Un codice esempio per ricevere le informazioni ed inviarle alla seriale, senza elaborarle, potrebbe essere il seguente:
//***************************************************************************
//Programma test per il robot Poor versione 2
//Setto le porte di uscita per le funzioni:
//Integrato trovato sulla macchinetta SM6135W oppure RX2-C
//Avanti PIN 10 ---- Integrato 11
//Indietro PIN 9 ---- Integrato 10
//Destra PIN 5 ---- Integrato 6
//Sinistra PIN 6 ---- Integrato 7
//Seriale TX PIN 0
//Seriale RX PIN 1
//Velocità standard 9600
//Bit di stop 1
//Bit di parità 0
//PIN standard 1234
//
//Realizzato da: Daniele Loddo alias Ivotek
//Data: 23/04/2016
//Web: www.mignololab.org www.ivotek.it
//Email: info@mignololab.org ivotek@gmail.com
//Versione 2.0
//
//
// Protocollo ricezione dati direzione e velocità
//
//Il protocollo inizia con un asterisco *
//Seguito da 12 numeri interi con valore da 0 a 9
//Esempio: *255000125000
//I numeri devono essere divisi in gruppi di tre quindi l'esempio superiore sarà:
//255 000 125 000
//La sequenza è avanti indietro destra sinistra, sempre seguendo l'esempio precedente i valori sono:
//avanti 255 indietro 000 destra 125 sinistra 000
//
//Il valore massimo che si può inserire è 255 il minimo è 000
//
//
//
//Inserita la bussola, modello HMC5883L
//Scale del sensore 0.88, 1.3, 1.9, 2.5, 4.0, 4.7, 5.6, 8.1 gauss
//Scala impostata 1.3
//SCL PIN A5
//SDA PIN A4
//
//Il giroscopio utilizzato è il modello GY-521 (MPU-6050)
//Permette di misurare l'accelerazione, l'inclinazione e la temperatura.
//SCL PIN A5
//SDA PIN A4
//
//Il sensore DHT 11 misura temperatura e umidità
//PIN 3 ATTENZIONE lo stesso del trigger degli ultrasuoni
//La porta A0 riceve la tensione di alimentazione
//***************************************************************************
//Includo le librerie per gestire il protocollo I2C
#include <Wire.h>
//Libreria per gestire la bussola
//ATTENZIONE: Queste librerie non sono standard e vanno aggiunte
//da Sketch-->Importa libreria-->Add library
#include <HMC5883L.h>
#include <dht11.h>
//Dichiaro le variabili per utilizzare i nomi al posto dei numeri
//Spreco memoria ma il codice risulta leggibile al principiante
int Destra = 5;
int Sinistra = 6;
int Avanti = 10;
int Indietro = 9;
int LineaDx = 4;
int LineaSx = 7;
int LineaCDx = 2;
int LineaCSx = 8;
int FotoSx = A1;
int FotoCx = A2;
int FotoDx = A3;
//Variabile per contenere il carattere
char carattere = 0;
//Variabile per contenere tutta la stringa di informazione
unsigned int StringaComandi[12];
//Variabili di lavoro del ciclo
byte x;
//Variabili per i valori dei comandi
unsigned int ValoreAvanti, ValoreIndietro, ValoreDestra, ValoreSinistra;
//funzione per convertire i singoli numeri in intero
int ConvertiIntero(int, int, int);
//Creiamo l'instanza per la bussola
HMC5883L bussola;
//Variabile per i gradi della bussola
float gradi;
//Indirizzo dell'MPU-6050
const int MPU=0x68;
//Vatiabili per contenere i valori dell'accellerazione
//inclinazione e temperatura
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
//Definisco l'istanza e il piedino per il sensore di
//temperatura e umidità
dht11 DHT;
#define DHT11_PIN 3
//Variabile per contenere i dati
int Check, Umidita,Temperatura ;
//Variabili per i sensori
int UltrasDx = 13;
int UltrasSx = 11;
int UltrasCx = 12;
int UltrasTr = 3;
//Variabili per contenere i valori dei sensori
int vUltrasDx;
int vUltrasSx;
int vUltrasCx;
//Variabili per contenere il tempo dell'eco
long TempoechoDx;
long TempoechoSx;
long TempoechoCx;
//Variabili per la conversione in centimetri
long centimetriD;
long centimetriS;
long centimetriC;
//Variabili per la conversione dell'alimentazione
int alim_digit;
float alimentazione;
//Dichiaro le variabili per i sensori ottici
int vLineaDx;
int vLineaSx;
int vLineaCDx;
int vLineaCSx;
//Variabili per contenere i valori dei sensori fotoresistivi
float vFotoDx;
float vFotoSx;
float vFotoCx;
void setup() {
//Apro la seriale a 9600
Serial.begin(9600);
//Attivo il protocollo I2C per la trasmissione e ricezione
Wire.begin();
//Inizializzo la trasmissione con il giroscopio
Wire.beginTransmission(MPU);
//Registro di power, mi serve per attivare il giroscopio
Wire.write(0x6B);
//Attivo il giroscopio
Wire.write(0);
//Termino la trasmissione
Wire.endTransmission(true);
//Inizializzo la bussola
bussola = HMC5883L();
//Setto la scala della bussola 1.3Ga
//Le misure sono da -8.1 a +8.1Ga
int errore = bussola.SetScale(8.1);
//Controllo se il settaggio è andato a buon fine
if(errore != 0)
//Se genera un errore lo stampo sulla seriale
Serial.println(bussola.GetErrorText(errore));
//Setto la misurazione continua
errore = bussola.SetMeasurementMode(Measurement_Continuous);
//Controllo se il settaggio è andato a buon fine
if(errore != 0)
//Se genera un errore lo stampo sulla seriale
Serial.println(bussola.GetErrorText(errore));
//Setto i PIN come out per pilotare i motori del robot.
pinMode(Avanti,OUTPUT); //Setto la porta Avanti come uscita
pinMode(Indietro,OUTPUT); //Setto la porta Indietro come uscita
pinMode(Destra,OUTPUT); //Setto la porta Destra come uscita
pinMode(Sinistra,OUTPUT); //Setto la porta Sinistra come uscita
}
void loop() {
//Controllo se la seriale è connessa
while (!Serial) {;}
//Leggo gli assi X ed Y della bussola
MagnetometerRaw raw = bussola.ReadRawAxis();
float radianti = atan2(raw.YAxis, raw.XAxis);
//L'angolo ottenuto è in radianti e va converto in gradi
if(radianti < 0)
radianti += 2*PI;
float gradi = radianti * 180/M_PI;
//Inizio la trasmissione con il giroscopio
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true);
AcX=Wire.read()<<8|Wire.read(); // Accellerazione asse X
AcY=Wire.read()<<8|Wire.read(); // Accellerazione asse Y
AcZ=Wire.read()<<8|Wire.read(); // Accellerazione asse Z
Tmp=Wire.read()<<8|Wire.read(); // Temperatura. non utilizzata
GyX=Wire.read()<<8|Wire.read(); // Giroscopio asse X
GyY=Wire.read()<<8|Wire.read(); // Giroscopio asse Y
GyZ=Wire.read()<<8|Wire.read(); // Giroscopio asse Z
//Leggo i dati dal sensore di umidità e temperatura
//E controllo se il sensore è pronto
Check = DHT.read(DHT11_PIN);
if (Check == DHTLIB_OK){
//Se il sensore è pronto prelevo i dati
Umidita = DHT.humidity;
Temperatura = DHT.temperature;
}
//Setto la porta UltrasTr come uscita
pinMode(UltrasTr, OUTPUT);
//Genero un impulso di 10 micro secondi per il trigger
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
delayMicroseconds(3); //Attendo 3 microsecondis
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
//Prelevo il tempo dai sensori
TempoechoDx = pulseIn( UltrasDx, HIGH,38000 );
delay(10);
//Genero un impulso di 10 micro secondi per il trigger
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
TempoechoSx = pulseIn( UltrasSx, HIGH,38000 );
delay(10);
//Genero un impulso di 10 micro secondi per il trigger
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
TempoechoCx = pulseIn( UltrasCx, HIGH,38000 );
//Converto il tempo in centimetri
centimetriD = 0.034 * TempoechoDx / 2;
centimetriS = 0.034 * TempoechoSx / 2;
centimetriC = 0.034 * TempoechoCx / 2;
//Prelevo il dato dalla porta A0 per sapere il livello di alimentazione
alim_digit = analogRead(A0);
//Converto i dati binari in analogici
alimentazione= alim_digit * (5.0 / 1024.0);
//Moltiplico per due per avere la tensione del pacco batterie
alimentazione = alimentazione * 2;
//Prelevo i valori dai sensori di linea
vLineaDx = digitalRead(LineaDx);
vLineaSx = digitalRead(LineaSx);
vLineaCDx = digitalRead(LineaCDx);
vLineaCSx = digitalRead(LineaCSx);
//Prelevo i valori dai sensori fotoresistivi
vFotoDx = analogRead(FotoDx);
vFotoSx = analogRead(FotoSx);
vFotoCx = analogRead(FotoCx);
//Li ocnverto in volt
vFotoDx = vFotoDx * (5.0 / 1024.0);
vFotoSx = vFotoSx * (5.0 / 1024.0);
vFotoCx = vFotoCx * (5.0 / 1024.0);
//Controllo se sono presenti tutti i caratteri nel buffer
if (Serial.available() > 12) {
//Prelevo il primo carattere
carattere = Serial.read();
while (carattere == '*'){
//Il primo carattere è l'asterisco inizio la sequenza
for (x=0;x<12;x++){
carattere = Serial.read(); //Prelevo il singolo carattere
StringaComandi[x] = carattere; // Lo inserisco all'interno dell'array
}
//Trasformo i numeri singoli presenti nell'array in un numero intero
ValoreAvanti = ConvertiIntero(StringaComandi[0],StringaComandi[1],StringaComandi[2]);
ValoreIndietro = ConvertiIntero(StringaComandi[3],StringaComandi[4],StringaComandi[5]);
ValoreDestra = ConvertiIntero(StringaComandi[6],StringaComandi[7],StringaComandi[8]);
ValoreSinistra = ConvertiIntero(StringaComandi[9],StringaComandi[10],StringaComandi[11]);
//Assegno i valori ai comandi
analogWrite(Avanti, ValoreAvanti);
analogWrite(Indietro, ValoreIndietro);
analogWrite(Destra, ValoreDestra);
analogWrite(Sinistra, ValoreSinistra);
}
}
//Invio i dati alla seriale, per rispettare il protocollo
//Inserisco tutto su una linea e creo la stringa
Serial.println("[" + String(centimetriS) + "|" + String(centimetriC) + "|" + String(centimetriD) + "|" + String(gradi) + "|" + String(AcX) + "|" + String(AcY) + "|" + String(AcZ) + "|" + String(GyX) + "|" + String(GyY) + "|" + String(GyZ) + "|" + String(Umidita) + "|" + String(Temperatura) + "|" + String(alimentazione) + "|" + String(vLineaSx) + "|" + String(vLineaCSx) + "|" + String(vLineaCDx) + "|" + String(vLineaDx) + "|" + String(vFotoSx) + "|" + String(vFotoCx) + "|" + String(vFotoDx) + "]");
}
//Funzioni
int ConvertiIntero(int uno,int due, int tre){
//Se i valori sono tutti zero ritorno zero
if (uno == '0' && due =='0' && tre == '0') return 0;
//Converto i valori
if (uno != '0') uno = uno * 100;
if (due != '0') due = due * 10;
//Sommo i valori e restituisco l'intero
return uno + due+ tre;
}
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
![]() Aggiunta la sezione corsi.
Aggiunta la sezione corsi.
![]() Aggiunto il programma sulla telemetria (in fase di sviluppo).
Aggiunto il programma sulla telemetria (in fase di sviluppo).