Un buon supporto per costruire un robot è quello di usare una vecchia macchinetta radiocomandata, perchè ha a disposizione già le ruote con gli ingranaggi, i motorini con lo sterzo ed a volte anche un elettronica riutilizzabile.
Con questa macchinetta è possibile usare un motore per spostarsi avanti ed indietro e l'altro motore per sterzare a destra o a sinistra.
Per il momento ci concentreremo su questi movimenti, quindi sul pilotaggio dei motori.
Se non possedete una macchinetta radiocomandata, potete usare lo stesso sistema usato per il Poor, trovate il tutorial a questo indirizzo. Poor V1
I motorini, in corrente continua si muovono fornendogli un alimentazione adeguata.
Questo vuol dire che, un motorino in continua deve avere un alimentazione positiva ed una negativa per muoversi e girare.
E' possibile cambiare il senso di rotazione invertendo la polarità di alimentazione.
I motori elettrici di queste dimensioni, non possono essere collegati direttamente alla scheda perchè si rischierebbe di bruciarla.
Per collegarli abbiamo bisogno di una scheda supplementare chiamata ponte ad H o amplificatore di potenza.
Questa scheda può essere acquistata separatamente in internet, di solito usano integrati siglati L293 o simili.
La mia macchinetta, e presumo anche la vostra, ha a disposizione un ponte ad H a transistor che può essere sfruttato per l'occasione, ora vi spiego come.
La prima cosa da fare è smontare la scheda presente nella macchinetta e controllare se è presente l'integrato siglato SM6135W oppure RX-2B (gli integrati sono compatibili).
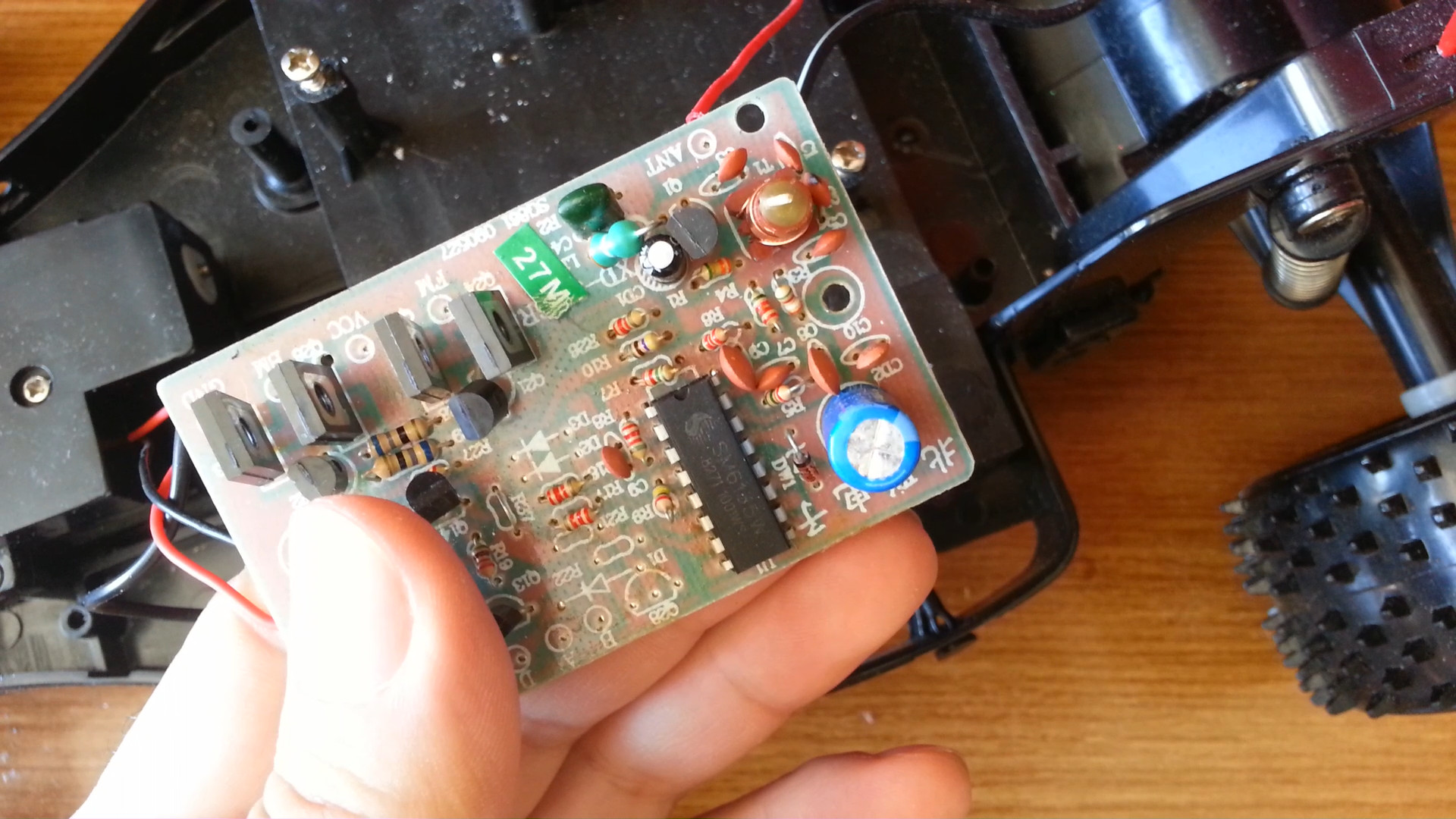
Se sono presenti questi integrati si può passare alla modifica e sfruttare il ponte ad H esistente.
Smontate l'intergrato e cercate la tacca di riferimento, presente in foto.

Contate i piedini in senso antiorario partendo dal primo in basso a sinistra, il piedino sotto la tacca e saldate dei fili ai piedini seguenti:
PIN 6
PIN 7
PIN 10
PIN 11

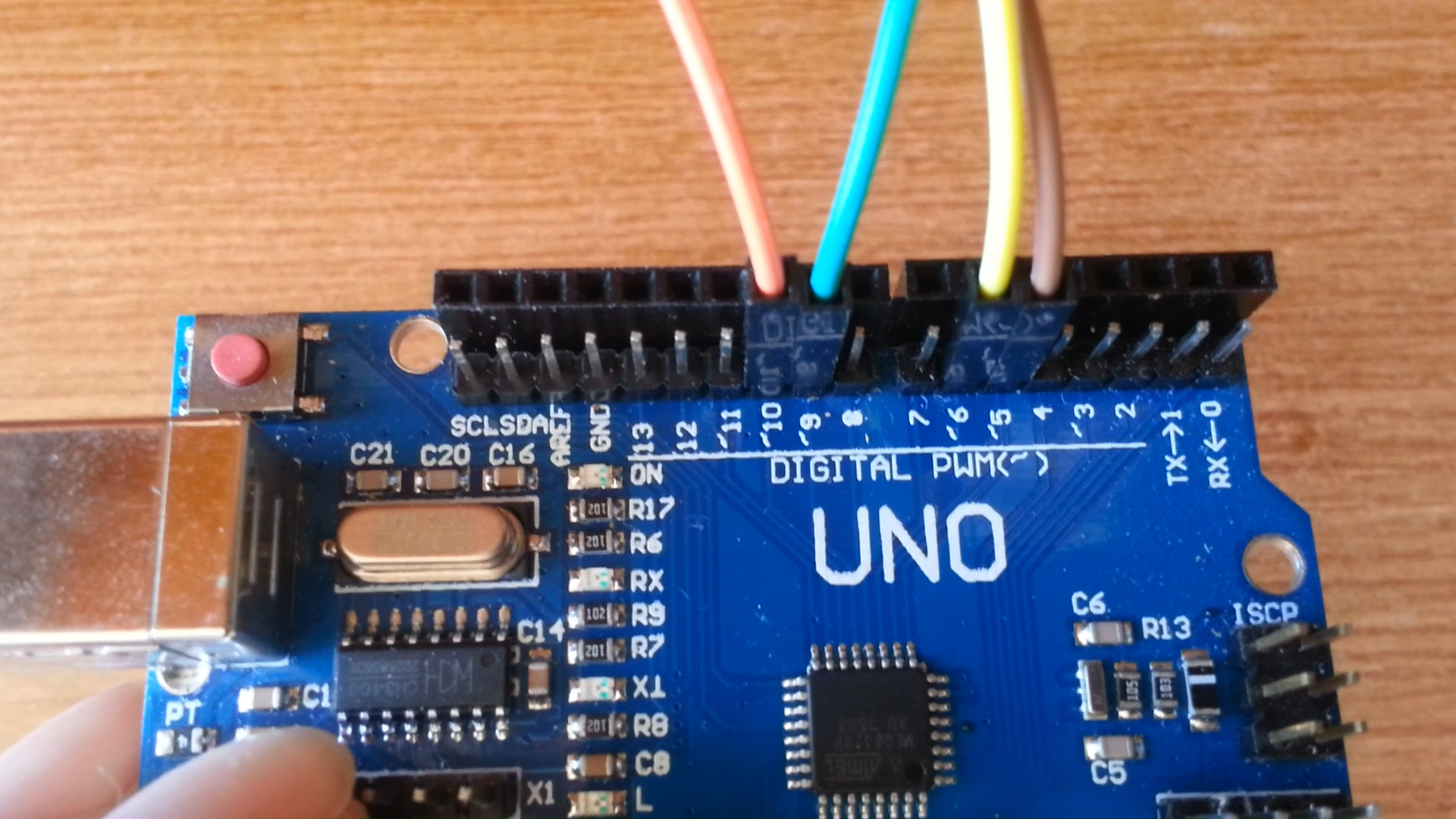
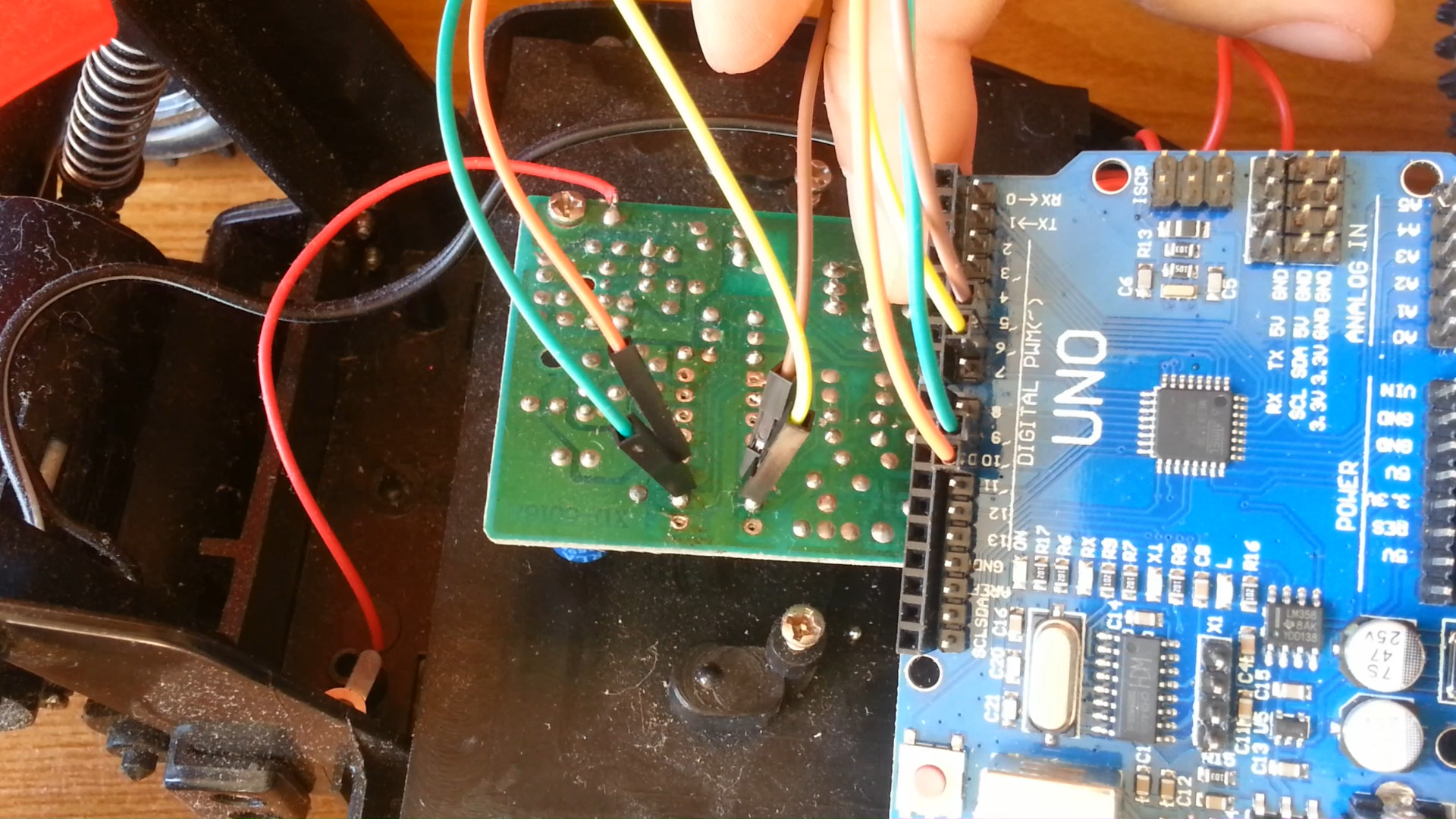
Avanti PIN 10 Arduino ---- PIN 11 Integrato
Indieto PIN 9 Arduino ---- PIN 10 Integrato
Destra PIN 5 Arduino ---- PIN 6 Integrato
Sinistra PIN 6 Arduino ---- PIN 7 Integrato
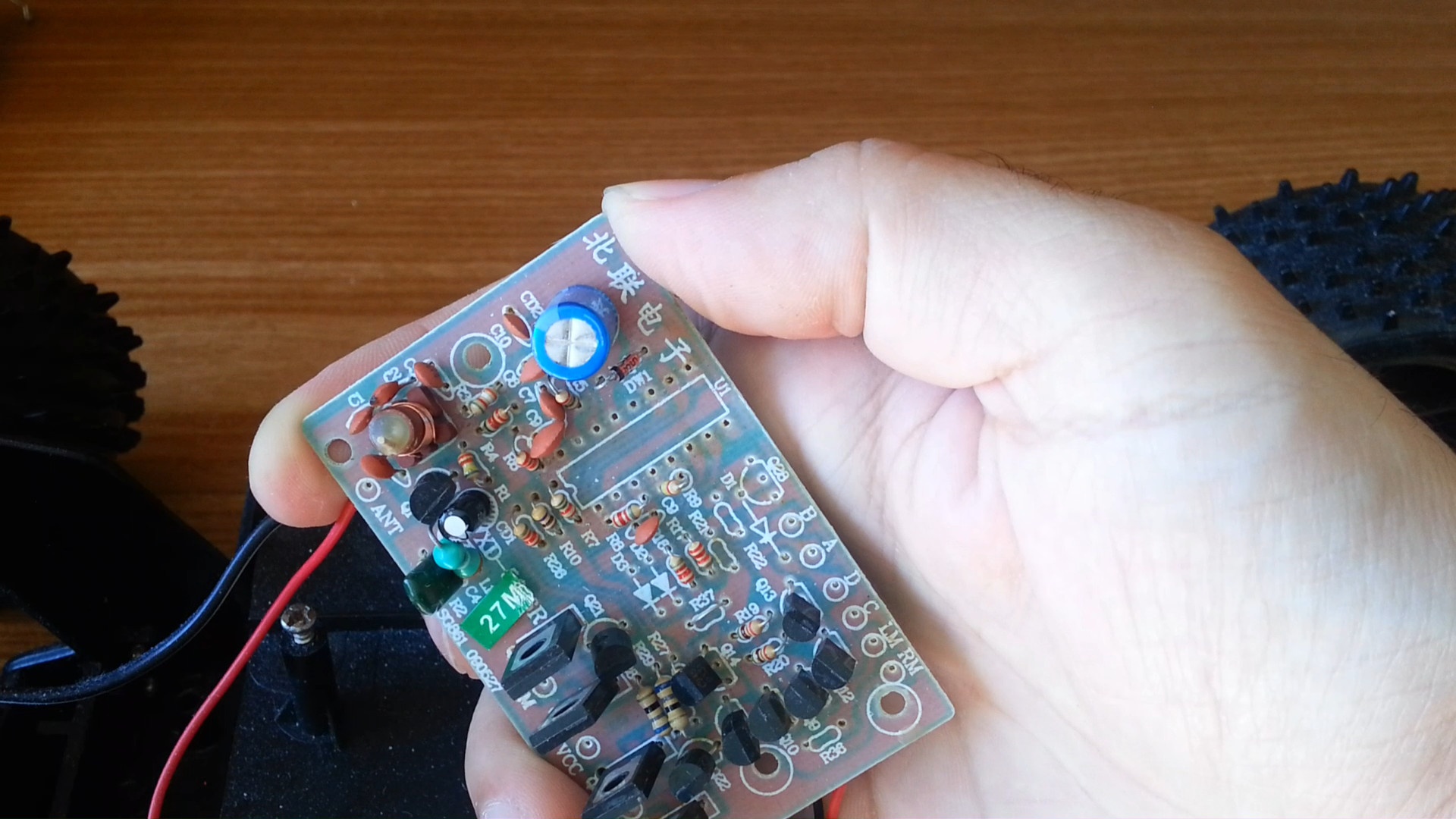
Se avete la scheda montata al contrario, potete saldare i fili al lato piste come in foto.
Ora fissate arduino alla scocca della macchina, come in foto.
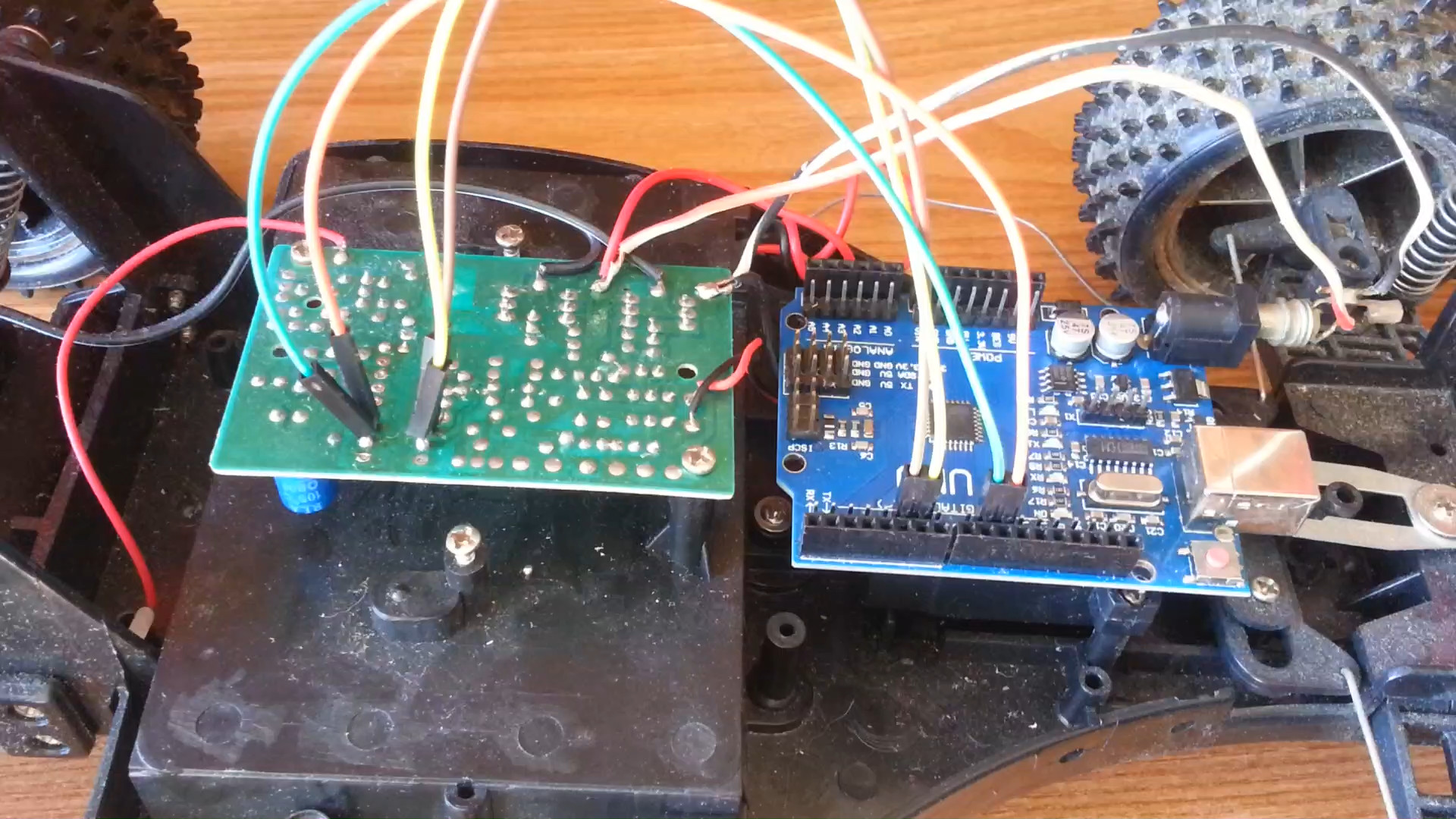
Fate attenzione a dove montate la scheda Arduino, non la montate troppo vicino ai motorini per evitare interferenze, oppure troppo lontano dal ponte ad H, per evitare che i cavi passino sopra i motorini e "catturino" le interferenze portandole alla scheda Arduino.
Potete attorcigliare i cavi tra di loro per migliorare la trasmissione e diminuire le interferenze.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.