Le porte di uscita della scheda Arduino che andranno a collegarsi con i sensori sono i seguenti:
Sensore ultrasuoni destra PIN 13
Sensore ultrasuoni centro PIN 12
Sensore ultrasuoni sinistra PIN 11
Mentre il piedino per il trigger di tutti e tre i sensori è:
Trigger ultrasuoni PIN 3
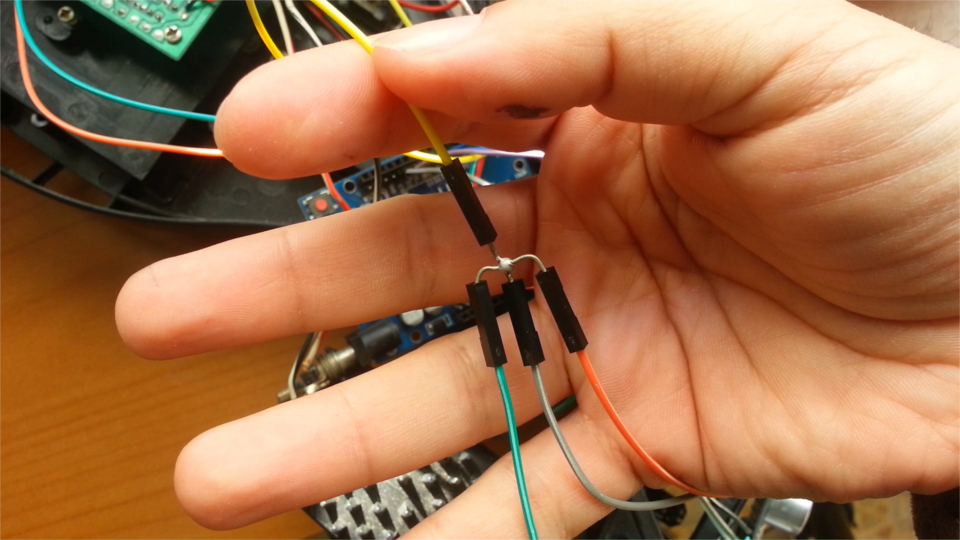
Non è necessario usare 3 piedini per generare gli impulsi sul trigger perchè questi vengono inviati uno per volta, quindi è sufficiente unire i 3 trigger ad un unico cavo.
Una soluzione potrebbe essere quella in foto.
L'istruzione che genera l'impulso sul trigger è la seguente:
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
Mentre l'istruzione che preleva il tempo in cui il piedino è a livello alto è la seguente:
TempoechoSx = pulseIn( UltrasSx, HIGH,38000 );
Il codice test completo è il seguente:
//***************************************************************************
//Programma test per il robot Poor versione 2
//Setto le porte di uscita per le funzioni:
//Integrato trovato sulla macchinetta SM6135W oppure RX2-C
//Avanti PIN 10 ---- Integrato 10
//Indietro PIN 9 ---- Integrato 11
//Destra PIN 5 ---- Integrato 6
//Sinistra PIN 6 ---- Integrato 7
//Sensore ultrasuoni destra PIN 13
//Sensore ultrasuoni centro PIN 12
//Sensore ultrasuoni sinistra PIN 11
//Trigger ultrasuoni PIN 3
//
//Realizzato da: Daniele Loddo alias Ivotek
//Data: 07/12/2015
//Web: www.mignololab.org www.ivotek.it
//Email: info@mignololab.org ivotek@gmail.com
//***************************************************************************
//Dichiaro le variabili per utilizzare i nomi al posto dei numeri
//Spreco memoria ma il codice risulta leggibile al principiante
int Destra = 5;
int Sinistra = 6;
int Avanti = 10;
int Indietro = 9;
int UltrasDx = 13;
int UltrasSx = 11;
int UltrasCx = 12;
int UltrasTr = 3;
//Variabili per contenere i valori dei sensori
int vUltrasDx;
int vUltrasSx;
int vUltrasCx;
//Variabili per contenere il tempo dell'eco
long TempoechoDx;
long TempoechoSx;
long TempoechoCx;
//Variabili per la conversione in centimetri
long centimetriD;
long centimetriS;
long centimetriC;
void setup() {
//Setto i PIN come out o in per pilotare i motori e i sensori di linea del robot.
pinMode(Avanti,OUTPUT); //Setto la porta Avanti come uscita
pinMode(Indietro,OUTPUT); //Setto la porta Indietro come uscita
pinMode(Destra,OUTPUT); //Setto la porta Destra come uscita
pinMode(Sinistra,OUTPUT); //Setto la porta Sinistra come uscita
pinMode(UltrasDx, INPUT); //Setto la porta UltrasDx come ingresso
pinMode(UltrasSx, INPUT); //Setto la porta UltrasSx come ingresso
pinMode(UltrasCx, INPUT); //Setto la porta UltrasCx come ingresso
pinMode(UltrasTr, OUTPUT); //Setto la porta UltrasT come uscita
}
void loop() {
//Genero un impulso di 10 micro secondi per il trigger
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
delayMicroseconds(3); //Attendo 3 microsecondi
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
//Prelevo il tempo dai sensori
TempoechoDx = pulseIn( UltrasDx, HIGH,38000 );
delay(10);
//Genero un impulso di 10 micro secondi per il trigger
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
TempoechoSx = pulseIn( UltrasSx, HIGH,38000 );
delay(10);
//Genero un impulso di 10 micro secondi per il trigger
digitalWrite(UltrasTr, HIGH ); //Alzo il livello a uno
delayMicroseconds( 10 ); //Attendo 10 microsecondi
digitalWrite(UltrasTr, LOW ); //Azzero l'uscita
TempoechoCx = pulseIn( UltrasCx, HIGH,38000 );
//delay(100);
//Converto il tempo in centimetri
centimetriD = 0.034 * TempoechoDx / 2;
centimetriS = 0.034 * TempoechoSx / 2;
centimetriC = 0.034 * TempoechoCx / 2;
//I sensori sono tutte e tre senza ostacoli
if (centimetriD > 15 and centimetriS > 15 and centimetriC > 15 )
{
//Il robot va avanti, cambiare il numero 255 per variare la velocità
analogWrite(Avanti, 255); // Il robot cammina alla massima velocità
analogWrite(Indietro, 0); // Il robot cammina alla massima velocità
//Lo sterzo è dritto
digitalWrite(Destra, LOW);
digitalWrite(Sinistra, LOW);
}
else if (centimetriD < 15 and centimetriD > 0) // C'è un ostacolo a destra
{
//Il robot gira a sinistra andando sempre avanti
digitalWrite(Destra, LOW);
digitalWrite(Sinistra, HIGH); // Il robot gira tutto a sinistra
//Il robot va avanti, cambiare il numero 255 per variare la velocità
analogWrite(Avanti, 255); // Il robot cammina alla massima velocità
analogWrite(Indietro, 0); // Il robot cammina alla massima velocità
}
else if (centimetriS < 15 and centimetriS > 0) // C'è un ostacolo a sinistra
{
//Il robot gira a destra andando sempre avanti
digitalWrite(Sinistra, LOW);
digitalWrite(Destra, HIGH); // Il robot gira tutto a destra
//Il robot va avanti, cambiare il numero 255 per variare la velocità
analogWrite(Avanti, 255); // Il robot cammina alla massima velocità
analogWrite(Indietro, 0); // Il robot cammina alla massima velocità
}
else if (centimetriC < 15 and centimetriC > 0) // C'è un ostacolo al centro
{
//Il robot si ferma
digitalWrite(Destra, LOW); // Il robot ha lo sterzo diritto
digitalWrite(Sinistra, LOW);
//Il robot si ferma
analogWrite(Avanti, 0);
analogWrite(Indietro, 0);
}
}
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.