Il modello della bussola utilizzata è il HMC5883L, il produttore ha messo a disposizione la libreria per il suo utilizzo.
Attenzione: la libreria non è presente nel software Arduino e quindi deve essere aggiunta dal menù Sketch --> Inclusione libreria --> Aggiungi una libreria da file ZIP.
La libreria è scaricabile da quì HMC5883L.
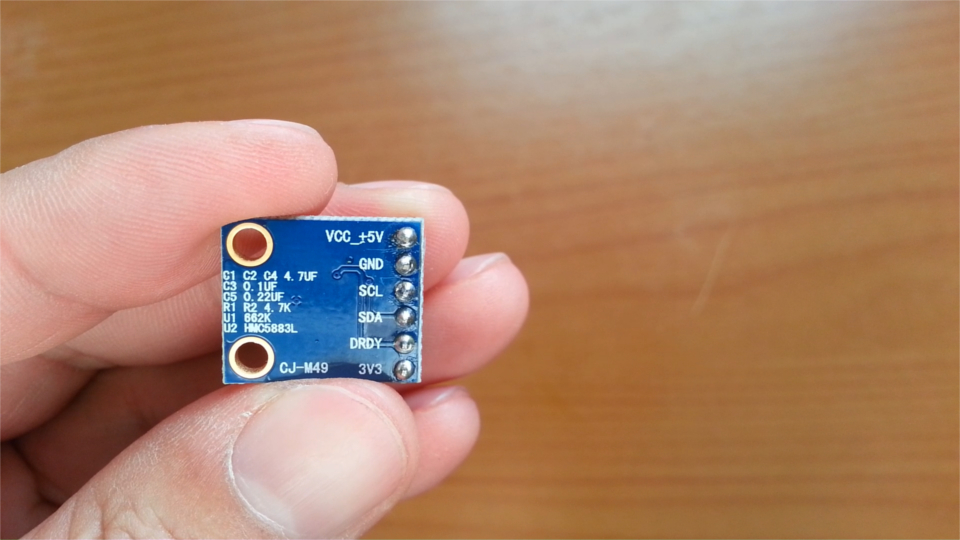
Una volta scaricata e installata la libreria si può passare al collegamento della bussola, i piedini che ci interessano sono:
SDA
SCL
VCC
GND
SDA deve essere collegato alla linea SDA della scheda Arduino.
SCL deve essere collegato alla linea SCL della scheda Arduino.
GND alla massa e quindi al polo negativo della batteria.
VCC ai 5 volt forniti dalla scheda Arduino.
Fate attenzione perchè la bussola può essere alimentata con due tensioni: 5Volt e 3,3Volt.
In questo caso io ho scelto i 5Volt perchè sto lavorando a 5 Volt, ma in altri casi è meglio scegliere 3,3Volt.
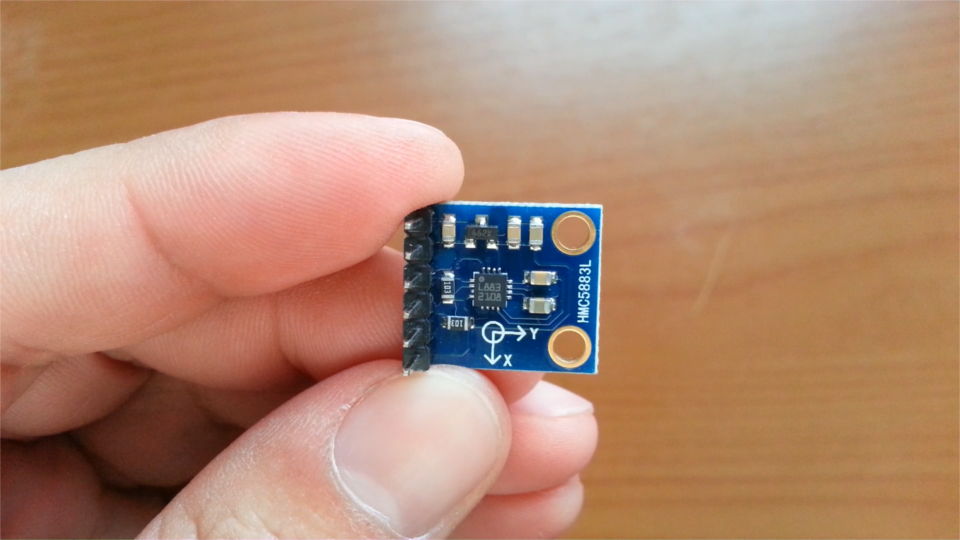
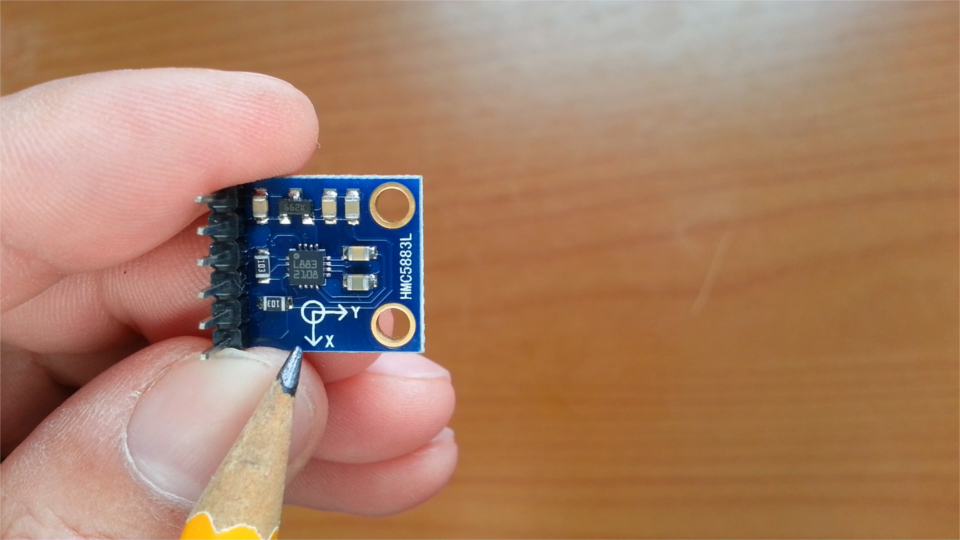
Un altra cosa da controllare sono gli assi della bussola, per poter avere delle informazioni precise sulla posizione polare.
Sulla bussola è disegnato il posizionamento del sensore interno con le sue assi.
La lettera X deve essere posizionata verso il muso del robot, o comunque verso la direzione di marcia del robot.
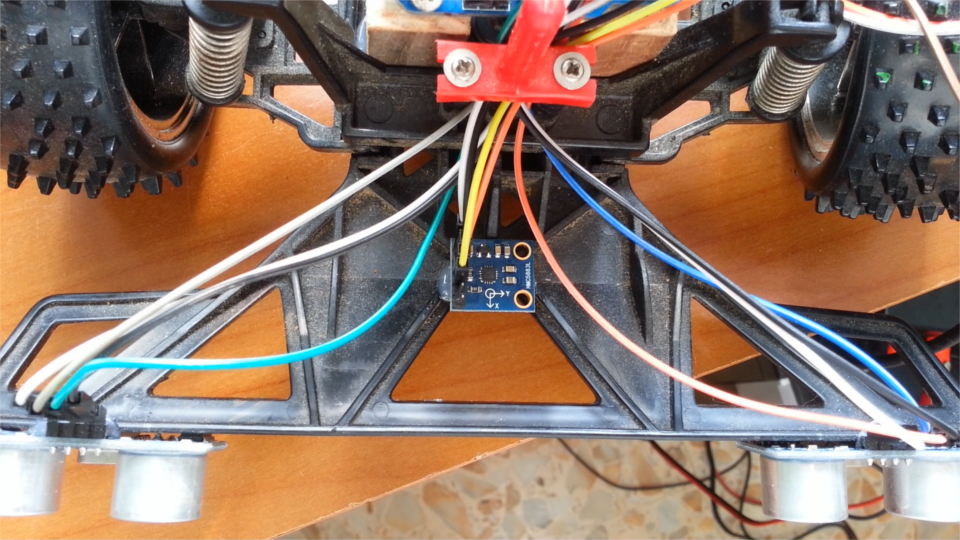
Un altro fattore importante è anche la posizione dove viene fissata la bussola.
Essendo un componente che misura un campo magnetico, è soggetta ad interferenze dello stesso e quindi, deve essere tenuta lontana dai motorini, da calamite o da forti campi elettromagnetici.
Non a caso, l'ho montata sul paraurti del robot.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.