
Il giroscopio è uno strumenti che ci permette di capire l'inclinazione del nostro robot.
Molti giroscopi hanno al loro interno anche un accelerometro che ci permette di misurare l'accelerazione.
Il modello da me scelto è il GY-521 (MPU-6050) che permette un collegamento con la scheda tramite il protocollo I2C, visto in precedenza.
Oltre ad avere un giroscopio ed un accelerometro integrato, ha anche un sensore di temperatura che non userò, solo per motivi didattici.
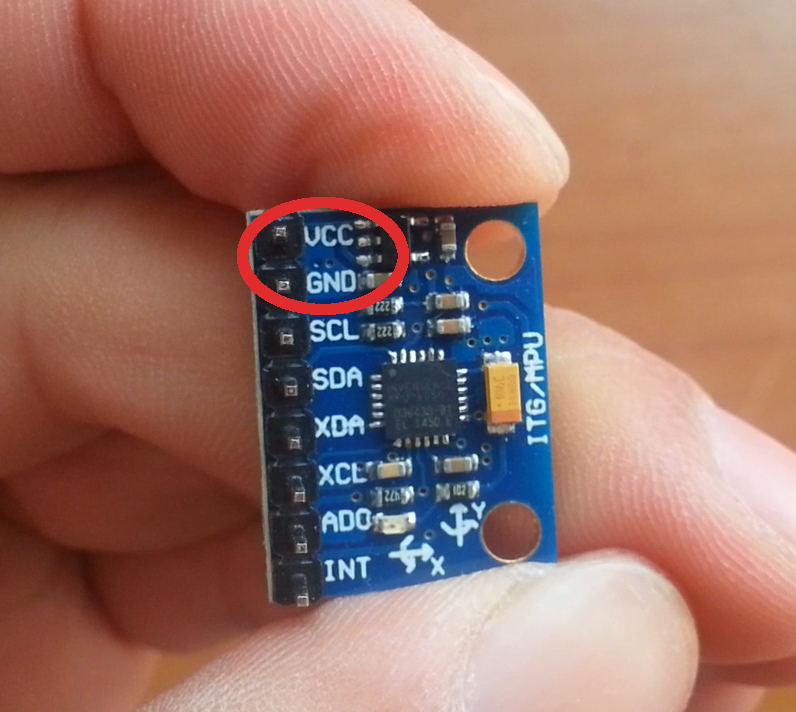
La scheda ha un alimentazione di 3,3Volt da collegare ai piedini VCC GND.
Ricordate di verificare sempre la tensione di lavoro della schede del robot prima di collegarla, in questo caso il giroscopio è alimentato a 3,3Volt.
Quando acquistate le schede, ricordatevi che ne esistono con differenti alimentazioni, a 3,3Volt, 5Volt oppure a 12Volt etc, controllate sempre.
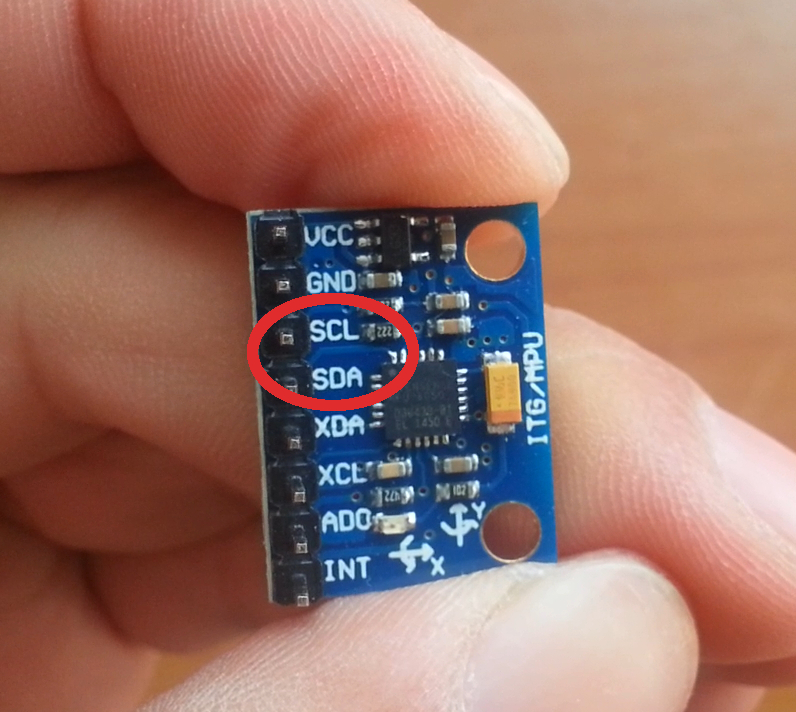
A livello hardware il collegamento è identico alla bussola, vista nella lezione precedente, quindi abbiamo una linea SDA,una linea SCL, rispettivamente per i dati e per il clock, e poi c'è la massa in comune a tutti.
Il pilotaggio a livello software è molto simile alla bussola, essendo uno slave con protocollo I2C, ed utilizzando la scheda Arduino, tutto sarà più semplice grazie alle librerie integrate.
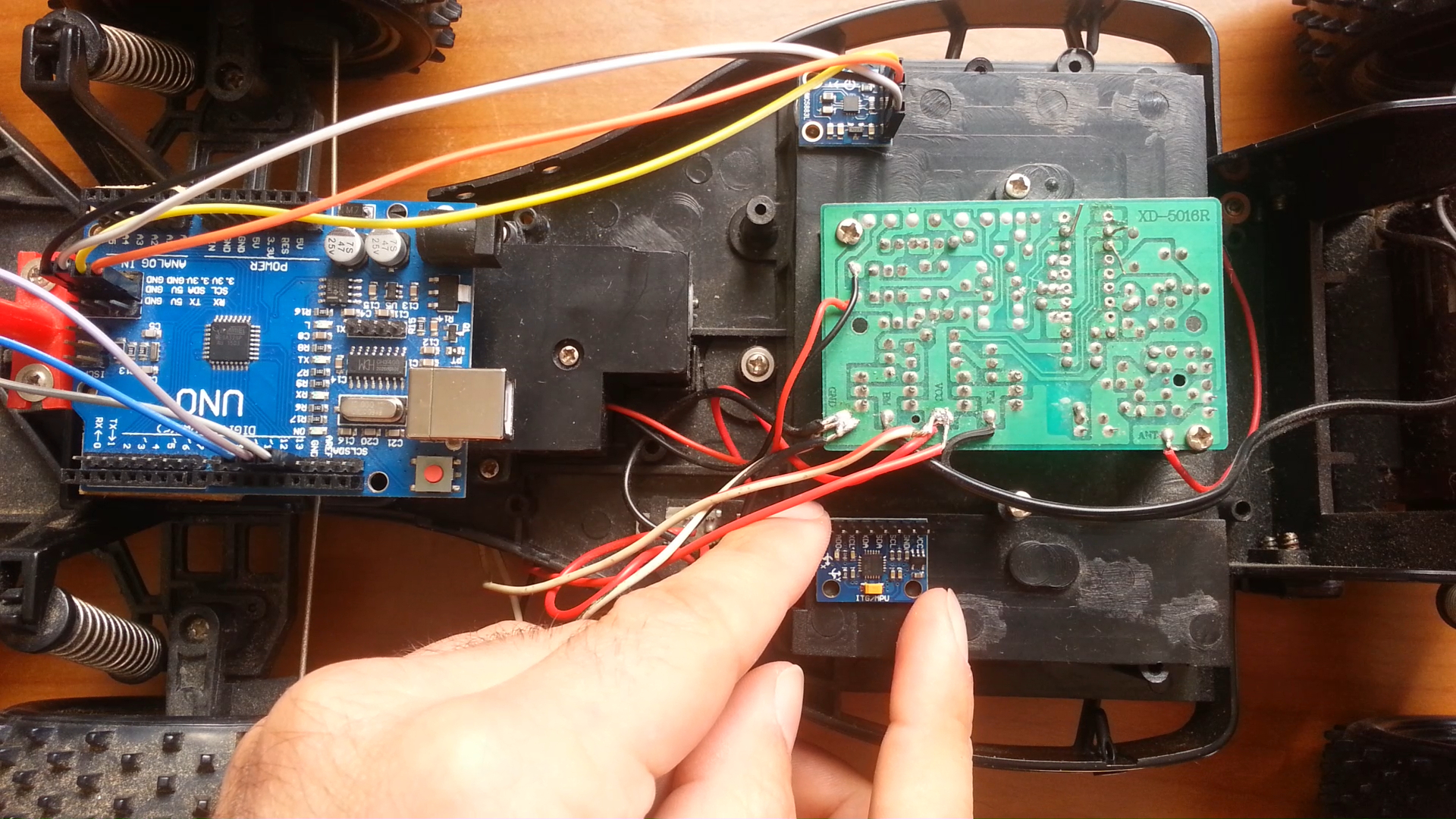
Come si può vedere, sullo stesso bus, e quindi sugli stessi piedini (A4 A5) abbiamo collegato due sensori.
I sensori, non entreranno in conflitto tra di loro, permettendoci di ampliare il nostro robot anche se, abbiamo a disposizione poche uscite.
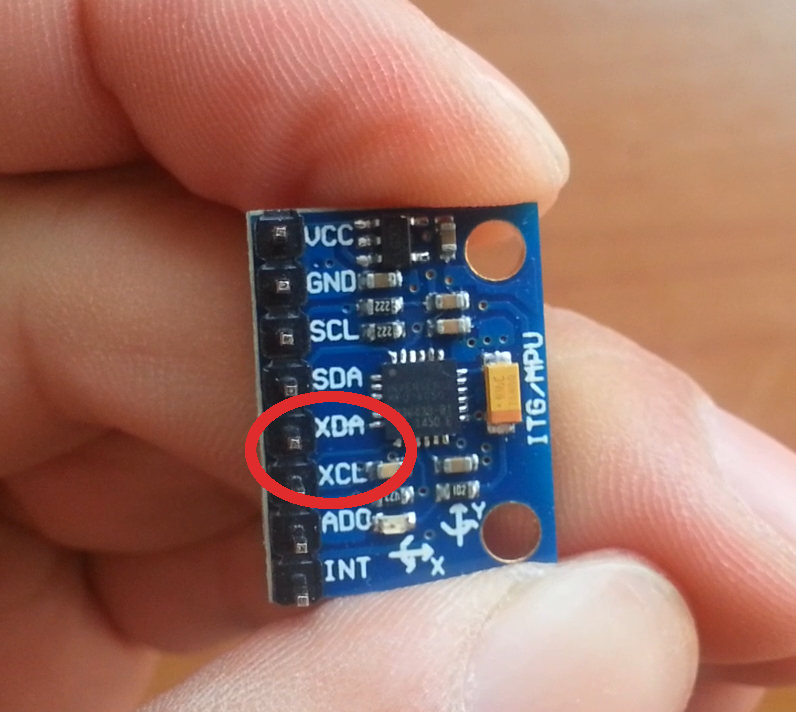
Oltre ai piedini SDA ed SCL, la scheda è dotata di altri piedini:
XCL
XDA
XDA ed XCL permette di continuare la linea bus per collegare altri dispositivi.
E' una sorta di amplificatore per evitare che, i sensori, assorbendo troppa corrente creino dei problemi con i successivi.
In questo caso non è stata usata in quanto, nel progetto uso solo due schede sulla linea I2C e le alimentazioni sono differenti.
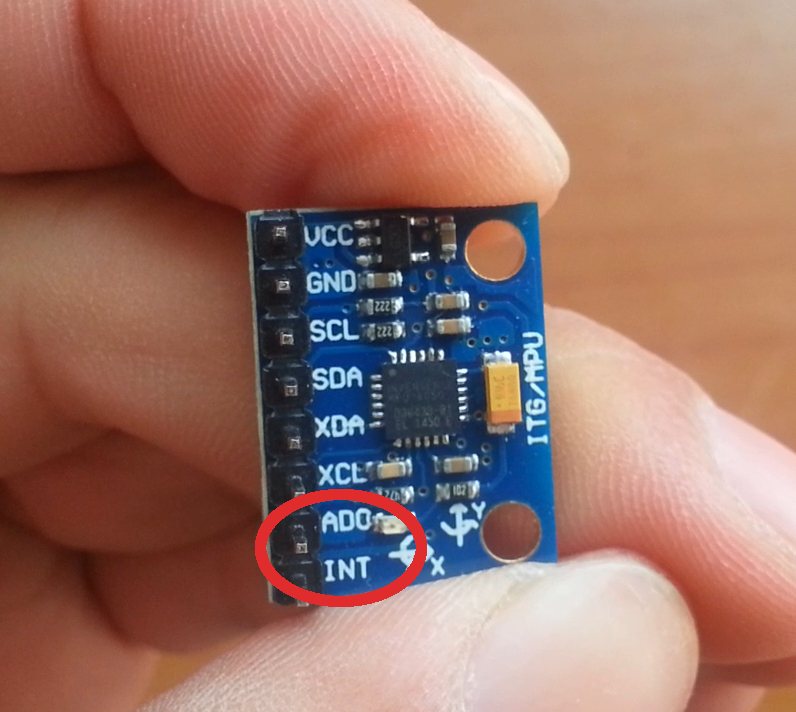
I piedini:
AD0
INT
Sono piedini di uso secondario che mette a disposizione la scheda per dialogare con l'integrato MPU-6050
AD0 è un piedino che è posizionato a zero per avere l'indirizzo a 0x68, ad 1 per l'indirizzo 0X69
INT è un piedino che genera un interrupt ogni volta che il giroscopio ha dati differenti nel suo registro, in questo modo può avvertire il microcontrollore che è cambiato qualcosa.
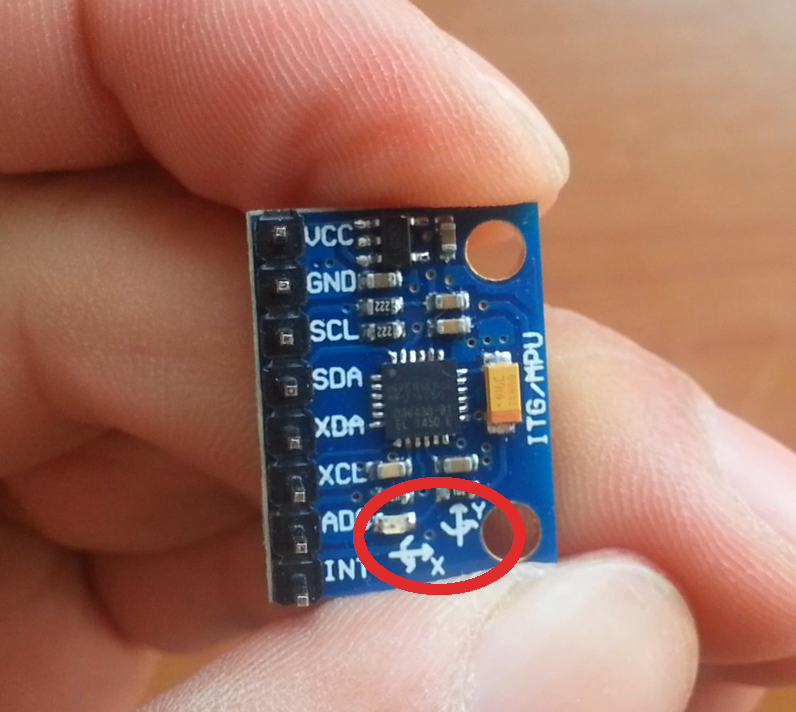
Un ultima cosa da sapere è che, anche il giroscopio ha un verso come la bussola ed è indicato con delle freccette simili a quelle in foto.
La lettera X va diretta verso il muso del robot.
Anche questa scheda è stata montata lontano dai motori elettrici, come si può vedere dalla foto.
LEZIONE19
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.